A Complete Robotic Knee As a Tool for a Better Understanding of Joint Dynamics
Felix Russell
Research questions
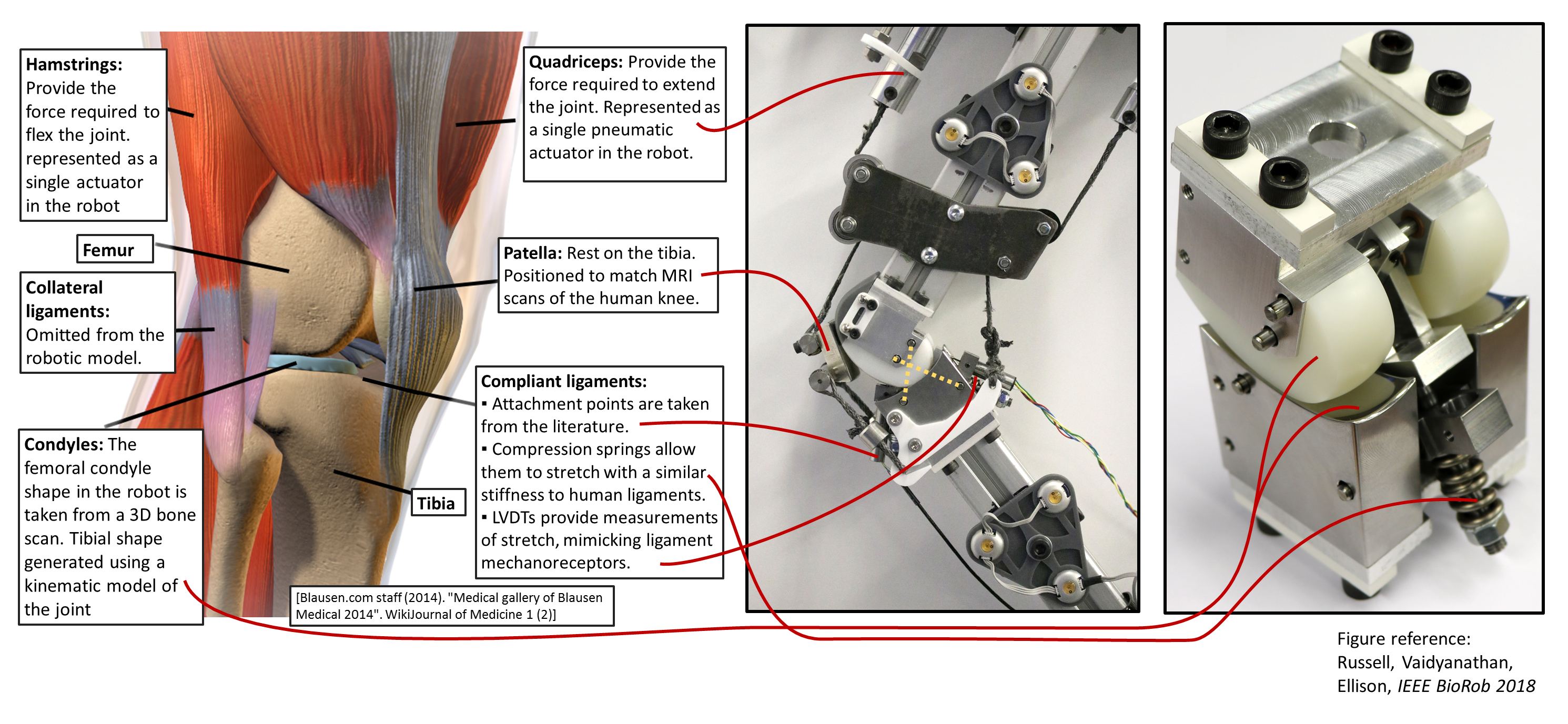
This project aims to investigate the roll of the cruciate ligaments in healthy joint function. The investigation will take place using an anthropomorphic mechanical model of the human knee. As far as is possible the geometries and elasticity of the elements within the joint have been taken from measurements and imaging of humans. The model includes compliant cruciate ligaments, smooth joint surfaces (condyles) and a knee cap (patella). In addition, the joint is actuated by pneumatic cylinders representing the quadriceps and hamstrings, acting as an antagonistic pair, which produce forces with similar lines of action to those found in the human leg. The model is mounted in to a test rig that allows the joint to perform a squatting motion with the ‘hip’ free to move in the vertical direction and the ‘foot’ pinned at the base. It is hoped that using this test method we can perform highly dynamic tests to further our understanding of the importance of ligaments for performing dynamic tasks and for joint stability.
In addition we wish to explore how this type of bioderived joint be used to improve passive-dynamic walking robots and rehabiliation devices. There are many useful natural properties of the human knee mechanism such an ability to lock out in standing, the parallel compliance provided by the ligaments and the length data from elastic ligaments that is used in human joint control. We wish to investigate how all these features of the human joint could be used to improve current robotic systems.
Publications
Russell, F., Kormushev, P., Vaidyanathan, R. and Ellison, P., 2020. The impact of ACL laxity on a bicondylar robotic knee and implications in human joint biomechanics. IEEE transactions on bio-medical engineering. https://doi.org/10.1109/TBME.2020.2971855
Russell, F., Kormushev, P., Vaidyanathan, R. and Ellison, P., 2019, June. An Anthropomorphic Robotic Model of the Human Knee. Dynamic Walking 2019. View the abstract here
Russell, F., Zhu, Y., Hey, W., Vaidyanathan, R. and Ellison, P., 2018. A biomimicking design for mechanical knee joints. Bioinspiration & biomimetics. https://doi.org/10.1088/1748-3190/aad39d
Russell, F., Vaidyanathan, R. and Ellison, P., 2018, August. A Kinematic Model for the Design of a Bicondylar Mechanical Knee. In 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob) (pp. 750-755). IEEE. https://doi.org/10.1109/BIOROB.2018.8487734
Russell, F., Gao, L., Ellison, P. and Vaidyanathan, R., 2017, July. Challenges in using compliant ligaments for position estimation within robotic joints. In Rehabilitation Robotics (ICORR), 2017 International Conference on (pp. 1471-1476). IEEE. https://doi.org/10.1109/ICORR.2017.8009455
Co-Investigators
Dr Peter Ellison, Junior Research Fellow, Medical Engineering, Imperial College London
Funding
UK Engineering and Physical Sciences Reasearch Council (EPSRC)
Medical Research Council (MRC) Confidence in Concept (CiC) scheme grant with Össur inc.