Stroke Lesion Symptom Mapping
Lewis Formstone
Stroke is one of most common causes of death around the world, and constitutes one of the main causes of acquired adult disability. On top of this, improved healthcare has led to a falling stroke mortality rate, leading to a larger population of motor impaired survivors. Although not directly treatable, motor impairment may be reduced in patients following a course of targeted rehabilitation, and this now forms a major component of stroke treatment in the UK. A key component of rehabilitation, and the focus of my project, is the identification of the degree of motor impairment in post-stroke patients.
The aim of my project is to develop an automated system of measuring motor function post stroke, fusing kinematic and muscle activity metrics recorded from the patient. This system has the potential to reduce the burden on clinicians by reducing administration time. In addition, the system may provide objectivity and accuracy not achievable with a human based measurement. An example of the experimental set up of my system is shown on the arm below.
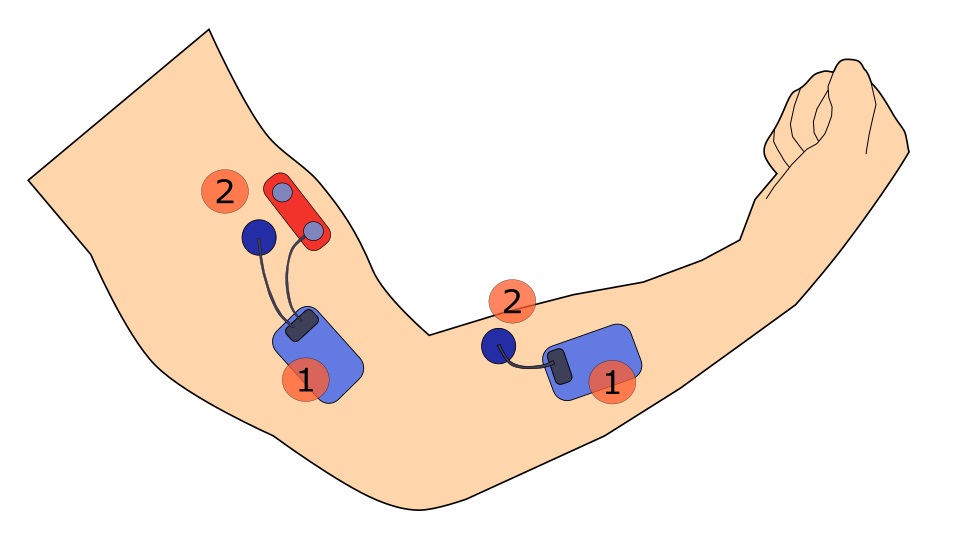
Kinematic data is gathered using a system called a MARG (Magnetic, angular rate, and gravity) system (number 1 in the diagram). Information calculated from these systems inlcude metrics such as joint angle, joint acceleration and velocity.
Muscle activity data is also gathered from the patient using the mechanomyogram (MMG) and electromyogram (EMG sensors) (number 2 in the diagram). These sensors provide information about the relative muscle activity required by patients during certain movements and the onset of fatigue.