Insect Inspired Autonomy
Charles Williams
Animals must integrate large amounts of sensor information to orient movements, often in milliseconds, to survive. Identical directives are faced by autonomous vehicles; particularly rapid assimilation of surroundings and real-time control. Drawing upon biological studies of neural organization of the cockroach escape response, our laboratory has designed a biologically-inspired evasion/orientation reflex for autonomous vehicles, and tested it in application to autonomous aircraft. Future work will involve biological studies on insects, as well as expanding system development to several platforms including manned and unmanned air vehicles, and autonomous ground vehicles. In the longer term, this work is envisioned to provide a foundation for sets of reflexes for all manner of behavior for autonomous vehicles.
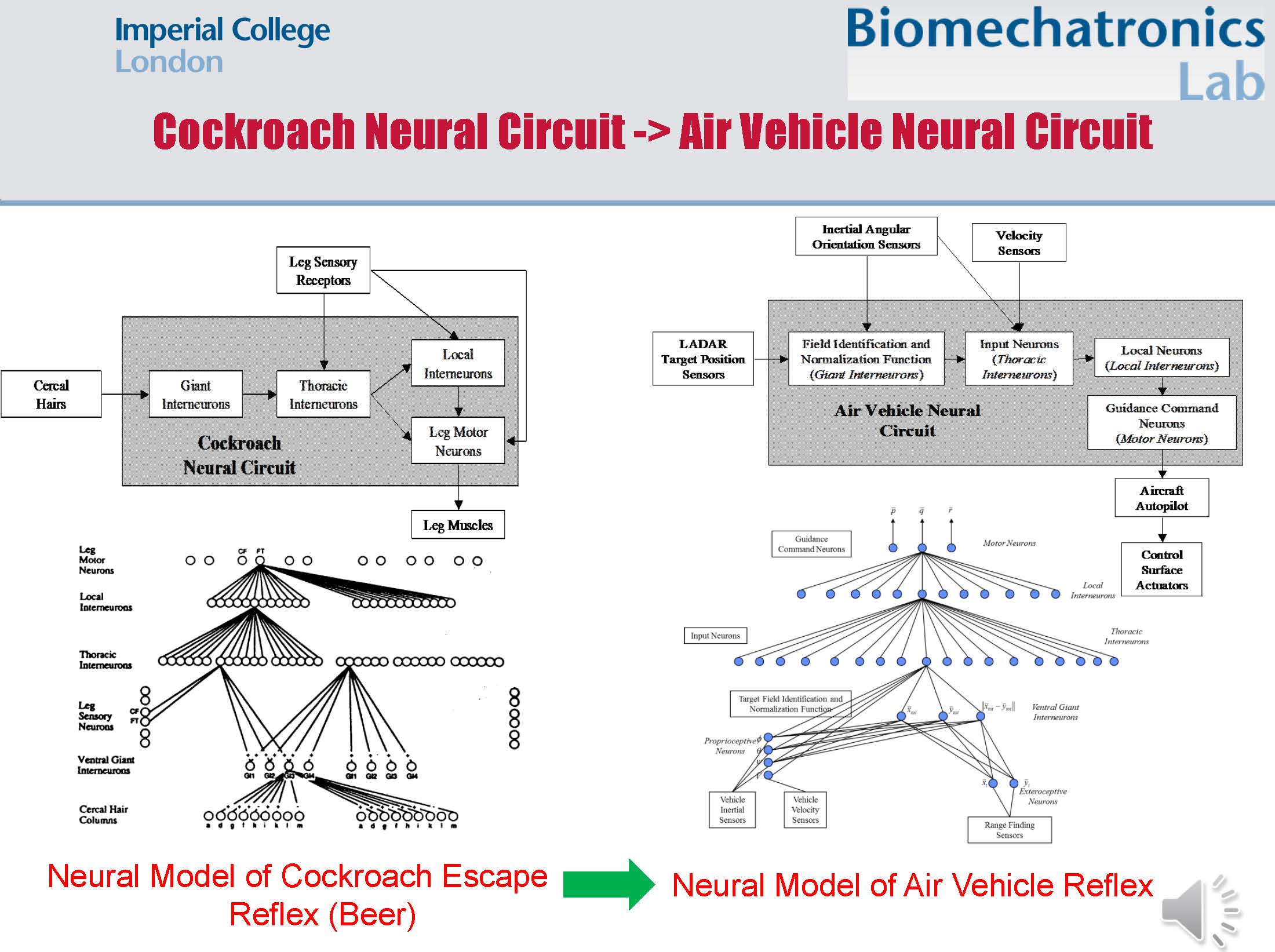
Architecture for cockroach escape response (left) and parallel autonomous vehicle reflexive control system (right)
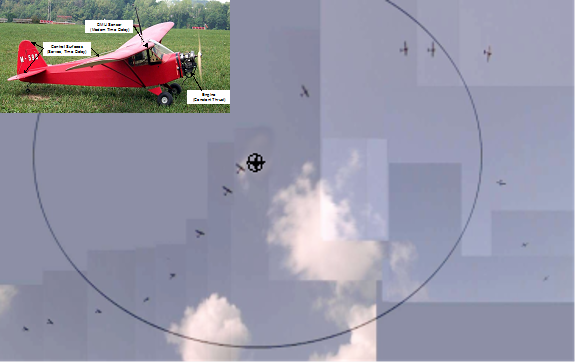
Actual flight test of insect-inspired orientation reflex. Trace shows aircraft moving into alarm radius, striking virtual target, holding heading until exiting alarm radius, and resuming original flight path with ¼ Scale Piper Cub Test Platform (top left)
Co-Investigators
Professor Roger Quinn, Director, Biologically Inspired Robotics Laboratory, Case Western Reserve University, USA
Professor Roy Ritzmann, Neuroscience, Case Western Reserve University, USA
Sponsors
US Air Force Research Laboratories (AFRL) Munitions Research Directorate
Orbital Research Inc. (commercial)
Multimedia
Video showing tests on a semi-autonomous car and and autonomous fixed wing aircraft of the insect-inspired orientation reflex